Observability-Aware Active Calibration of Multi-Sensor Extrinsics for Ground Robots via Online Trajectory Optimization
Research
Authors:
Jiang Wang·Institute of Science Tokyo
Yaozhong Kang·Southern University of Science and Technology
Linya Fu·Southern University of Science and Technology
Kazuhiro Nakadai·Institute of Science Tokyo
He Kong·Southern University of Science and Technology

Background
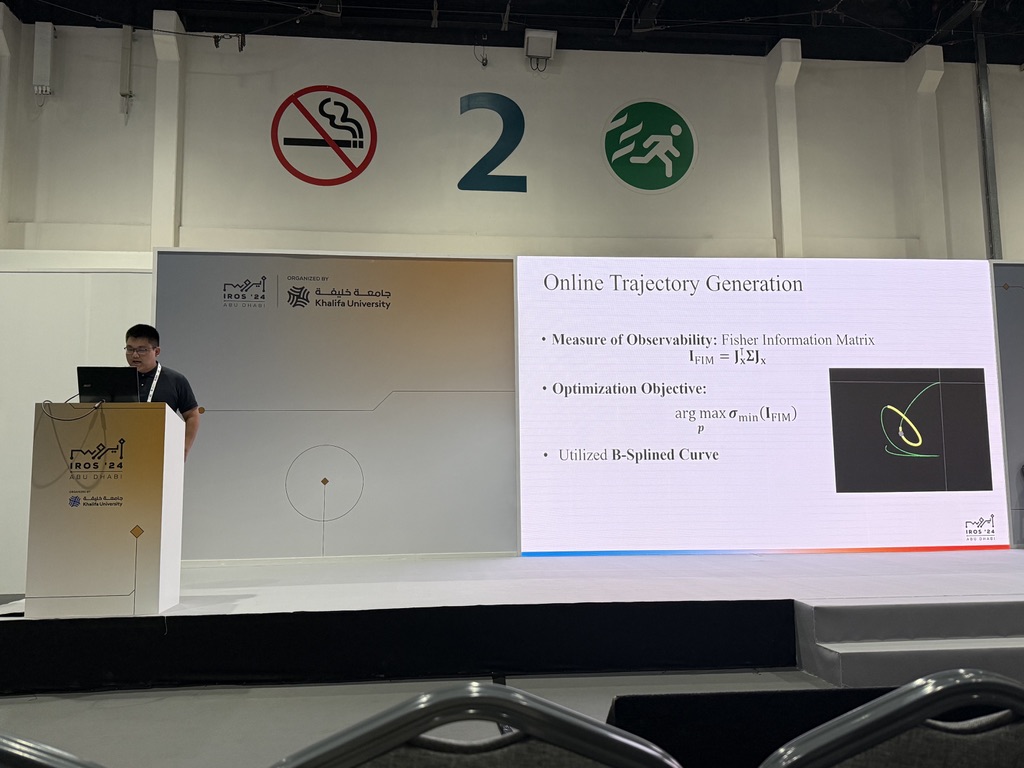
We propose an observability-based active multi-sensor extrinsic calibration method, achieving high-precision sensor calibration through online trajectory optimization.
Methodology
Our method includes the following key steps:
- Sensor observability analysis
- Online trajectory optimization utilizing B-spline curve
- Real-time extrinsic calibration
For detailed method and results, please refer to our poster/paper.
Experiment Setup
Some Photos on IROS 2024